The machine vision software learns a color distribution by generating a color spectrum.
The color spectrum is a one-dimensional representation of the three-dimensional color information in an image.
The machine vision software then generates a color spectrum based on the provided information.
The color spectrum becomes the basis of comparison during the matching phase.
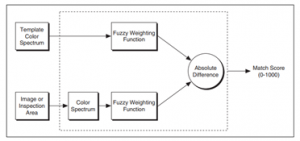
During the matching phase, the color spectrum obtained from or region in the target image is compared to the reference color spectrum taken during the learning step. A match score is computed based on the similarity between these two-color spectrums using the Manhattan distance between two vectors. A fuzzy membership weighting function is applied to both the color spectrums before computing the distance between them. The weighting function compensates for some errors that may occur during the binning process in the color space.
The fuzzy color comparison approach provides a robust and accurate quantitative match score. The match score, ranging from 0 to 1000, defines the similarity between the color spectrums. A score of zero represents no similarity between the color spectrums, while a score of 1000 represents a perfect match.